はじめに
NX開発推進部Android開発G所属の深沢と申します。今回は、Maker Faire Tokyoに参加し、出展物作成までの過程を振り返りたいと思います。Maker Faireとは何かについては公式サイトをご参照ください。
制作結果 “おしゃべりぱくちゃんず”
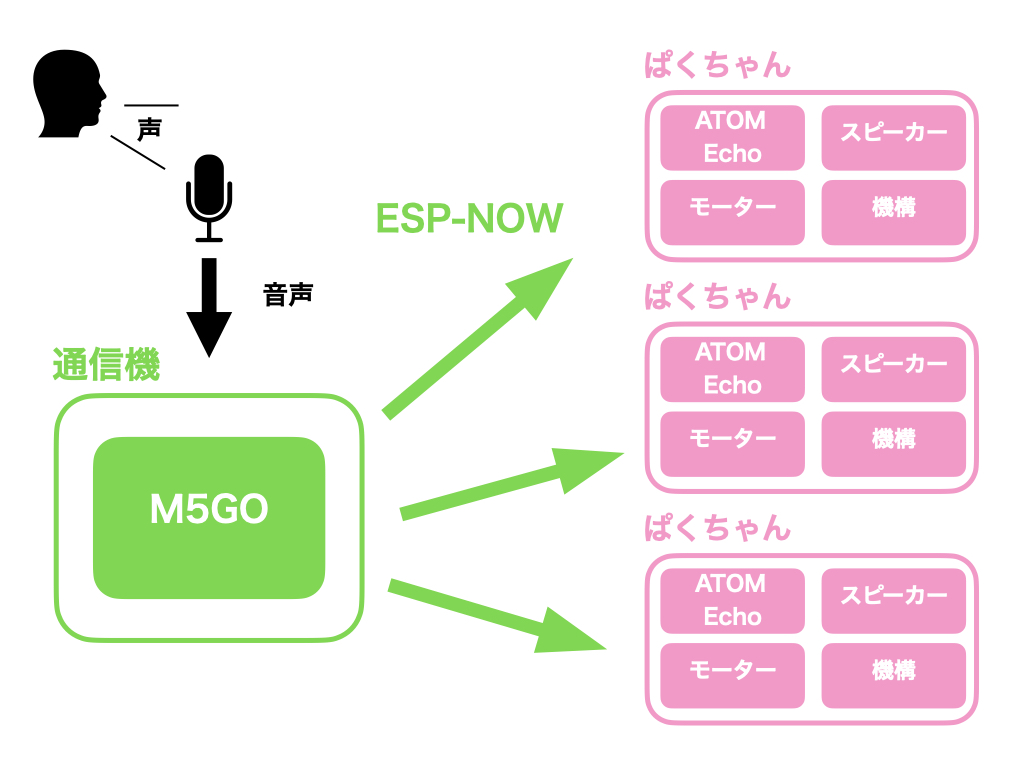
Maker Faire Tokyoに出展した作品が「おしゃべりぱくちゃんず」です。トランシーバー型の通信機に話しかけると、ぱくちゃんというロボットが通信を開始。通信機からの信号を受け取ったぱくちゃんは、ぱくぱくと動きながら音声を発します。これを10個ほど制作し、通信機が拾った音が大きいほど多くのぱくちゃんがおしゃべりするように設定しました。

以下では、具体的な「おしゃべりぱくちゃんず」の制作過程を紹介していきます。 全4回投稿予定です。本記事は第1回になります。
企画会議
私たちは出展者内で3つのキーワードを決めました。その一つが「アウトプット」で、私はこのキーワードを中心に作品を制作するチームに参加しました。
メンバーが揃った後、何を制作するかについての会議を開催しました。その中で「音に反応するもの」が良いという意見が多く出ましたので、これを中心に考えたところ音に反応してぱくぱくと動くものが良いのではないかということになり、はじめは「ぱくちゃん」という名前が決まりました。
その後話していく内にぱくちゃんを手乗りサイズにして、沢山並べたら見た目のインパクトも出て面白いのではないかという意見が出てきまして、複数形だから「ぱくちゃんず」にしようという事になりました。
また、音に反応して動くものは沢山あるので差別化したいよね、という話になり何かもう一つ特徴を加えようと考えました。結果として、ぱくぱくするときにおしゃべりしたら良いのではないかということでおしゃべり機能を追加し名称も「おしゃべりぱくちゃんず」に落ち着きました。
実装検証と仕様詳細化
実装にむけての準備
企画は決まったものの、実現可能性が未知だったため本格的に作成に取り掛かる前に検証を行いました。タスクを以下のように2つに分けて、おしゃべりぱくちゃんずの基礎となる部分を制作することにしました。電子工作の経験者がいなかったため、マイコンの中でも比較的扱いやすいM5Stack社製品を使うことに決めました。
- モーター制御
- 信号を受けてモーターを回し、信号の値によってモーターの回転速度を変更する
- 通信
- マイクから音を拾い、周波数ごとに分解し、信号を送信する
モーター制御に関しては、まずはM5StickC Plusのボタンを押したらモーターが回るようにしました。

電子工作の経験はほとんどなかったため、どう回路を組めばモーターが回るのか調べるところから始めました。
続いて通信についてです。複数のぱくちゃんを制御する必要があることと、Wi-FiだとMaker Faire Tokyo本番で混線する可能性が高いためESP-NOWを採用しました。
そして、2つのタスクを組み合わせたものが以下になります。
結果として、想定通りの動きをしてくれました! ATOM Echo内蔵のマイクに話しかけると、ATOM EchoとM5StickC Plus間で通信が行われ、 M5StickC Plusがモーターの回転を制御します。
上記の結果を踏まえて以下のような構成に決めました。
仕様の詳細化
実装検証の結果を踏まえて、「おしゃべりぱくちゃんず」の具体的な仕様を詰める作業に入りました。
- ぱくちゃん
- ボディ製造
- 3Dモデリング+3Dプリンタで印刷
- 音声データ受信機能
- ぱくぱくと動く機能
- モーター制御
- 回転運動→上下運動機構の製造
- おしゃべり機能
- スピーカー制御
- 通信機
- 音声データ送信機能
上記の検討と検証から、ぱくちゃんを作るのに必要な部品も明らかになりました。具体的には、
- ボディ(上半球と下半球)
- 回路
- モーター
- ATOM Echo
- 抵抗
- トランジスタ
- 電池
- その他基盤など
- モーターの回転運動を上下運動に変換する機構
- 通信機
- M5GO
- カバー
が必要だということがわかりました。
これらの要素を確認し、いよいよ「おしゃべりぱくちゃんず」の制作に本格的に取り組み始めました。
次回の記事はこちらになります。 【Maker Faire Tokyo】 おしゃべりぱくちゃんず作成までの道のり(2)~ボディ製造編~
深沢雛子



